Estimating Prediction Confidence with Tuned Lens
The Tuned Lens method
Warning
The tutorial is deprecated and won’t work with the most recent release of tuned-lens. It will be updated as
soon as possible.
Note
This tutorial adopts the “Tuned Lens” name for the affine transformation proposed by Belrose et al. (2023). We note that the Linear Shortcut method proposed by Yom Din et al. (2023) can be used for the same purpose, training a linear transformation instead.
Belrose et al. (2023) and Yom Din et al. (2023) introduced a new promising category of approaches to inspect how predictions are progressively formed across the layers of Transformers-based language models. By training projections mapping hidden states of intermediate layers to last layer’s space, authors overcome the assumption of a common space shared by all Transformer layers adopted by previous work. Tuned lens predictions are more aligned to model’s predictive distribution and more faithful to the internal feature importance leveraged by the model.

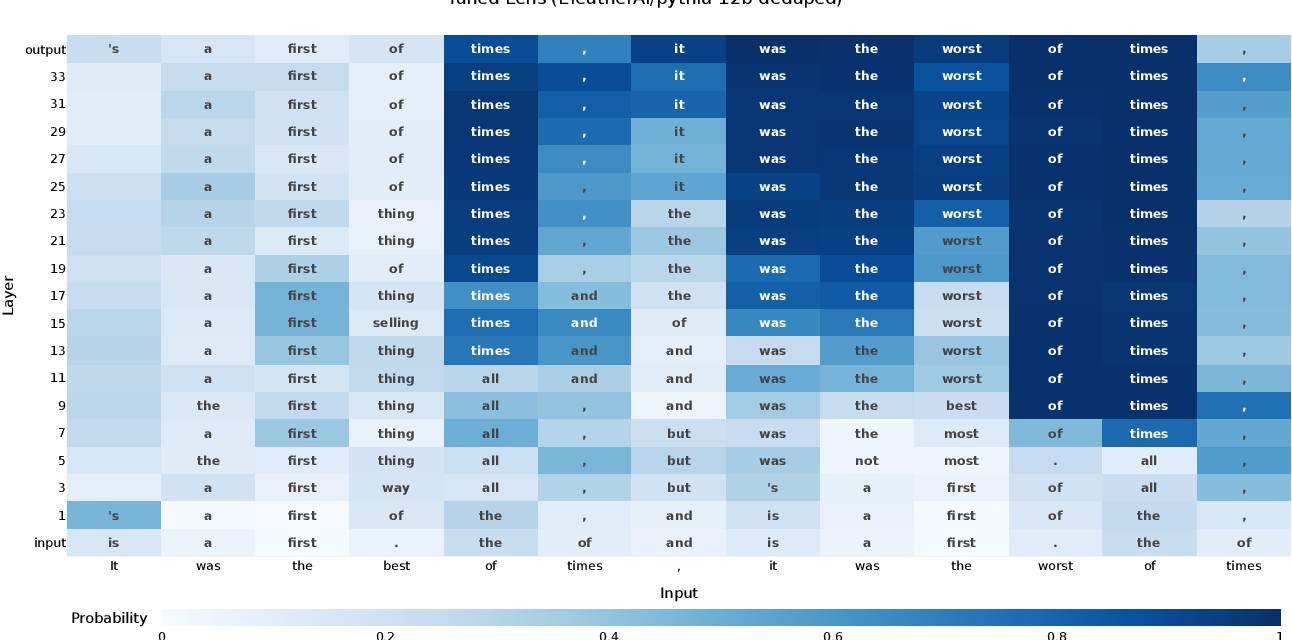
An interesting application of the tuned lens leverages the depth (i.e. number of model layers) at which a target token starts dominating the tuned lens’ predictive distribution as an indication of model confidence and example difficulty. This follows the intuition that simple examples would require less computation, and contrary to previous work does not involve further training of the language model. In this example by Belrose et al (2023), when a 12B GPT-like model is asked to complete the first sentence of Charles Dickens’ “A Tale of Two Cities”, its latent predictions become very confident at early layers, suggesting some degree of memorization.
Adding Tuned Lens Confidence to Inseq
Thanks to Inseq extensible design, it is straightforward to integrate the tuned lens method into a new step function to predict model confidence at every generation step. To do so, we use the tuned-lens library by Belrose et al. to extract the tuned lens’ predictions at every layer, and then convert the depth at which the model starts predicting the target token to a confidence score (1 = highest confidence, 0 = lowest confidence, not predicted).
The first step is to install the tuned lens library using pip install tuned-lens, and define our custom step function:
from tuned_lens.nn.lenses import Lens
from tuned_lens.residual_stream import record_residual_stream
import torch
def confidence_from_prediction_depth(
# Default arguments for Inseq step functions
args,
# Extra arguments for our use case
lens: Lens,
# We use kwargs to collect unused default arguments
**kwargs,
):
"""Returns 1 - the ratio of layers after which tuned lens projections over vocabulary
become aligned with the target token. This can be used as an indication of confidence in
model prediction. If the token is not predicted by the model, 0% is returned.
E.g. Using a 12-layer GPT-2 model, and the prompt "Hello ladies and",
if the target token is "gentlemen" and the tuned lens starts predicting it from layer 8 onwards,
the returned score is 1 - 8/14 ~= 0.429, indicating good confidence.
14 is the number of layers in the model, plus the embedding layer, plus 1 to account for the case
where the token is not predicted by the model.
"""
batch = attribution_model.formatter.convert_args_to_batch(args)
# Record activations at every model layer
with record_residual_stream(attribution_model.model) as stream:
outputs = attribution_model.get_forward_output(batch, use_embeddings=False)
# Select last token activations
stream = stream.map(lambda x: x[..., -1, :])
# Compute logits for each layer emebedding layer + n_layers
hidden_lps = stream.zip_map(
lambda h, i: lens.forward(h, i).log_softmax(dim=-1),
range(len(stream) - 1),
)
# Add last layer's logits
hidden_lps.layers.append(
outputs.logits.log_softmax(dim=-1)[..., -1, :]
)
num_layers = len(hidden_lps)
probs = hidden_lps.map(lambda x: x.exp() * 100)
probs = torch.stack(list(probs))
top_idx_per_layer = probs.abs().topk(1, dim=-1).indices.squeeze(-1).reshape(-1, num_layers)
if args.target_ids.ndim == 0:
args.target_ids = args.target_ids.unsqueeze(0)
# Set to max denominator to return 0 only if the target token is not predicted by the model
indices = torch.ones_like(args.target_ids) * (num_layers + 1)
for i, t in enumerate(args.target_ids):
pos = torch.where(top_idx_per_layer[i, :] == t.int())[0]
if pos.numel() > 0:
indices[i] = pos[0] + 1
# We add 1 to num_layers to ensure that the score is 0
# only if the target token is not predicted by the model
return 1 - (indices / (num_layers + 1))
Now we can simply register the function, load the lens corresponding to the model we want to use, and run the attribution:
import inseq
from tuned_lens.nn.lenses import TunedLens
model = inseq.load_model("gpt2", "input_x_gradient")
# Load tuned lens for the model from https://hf.co/spaces/AlignmentResearch/tuned-lens
tuned_lens = TunedLens.load("gpt2", map_location="cpu")
inseq.register_step_function(
fn=confidence_from_prediction_depth,
identifier="confidence",
)
out = model.attribute(
"Hello ladies and",
lens=tuned_lens,
device="cpu",
step_scores=["confidence"],
)
We can see that the row confidence, corresponding to the confidence score we defined above, is added at the end of
the attribution matrix, showing high model confidence for function words and multiword expressions endings
(e.g. “Board of Directors”, “ladies and gentlemen”). Since we are estimating model confidence on the model’s naturally
generated output, all confidence scores will be greater than 0, since this value is reserved for the case where the
target token is not predicted at all.
We can now repeat the experiment while constraining a target generation of our choice:
out = model.attribute(
"Hello ladies and",
# Custom target generation
"Hello ladies and gentlemen, members of the jury",
lens=tuned_lens,
device="cpu",
step_scores=["confidence"],
)
We see that some of the forced tokens are assigned a confidence score of 0 in this case.
Warning
The above example aims to show a possible easy integration of tuned-lens into Inseq, but has a number of limitations.
The entire computation using the method above is carried out on CPUs, since device placement is not handled.
The tuned lens library currently supports only decoder-only GPT-like models, so the method cannot be used as-is for encoder-decoders like T5 and BART.
Tuned lens authors provide a collection of pre-tuned lenses for popular models here. If your model of interest is not available, you will need to train a tuned lens for it yourself, which can be done using the tuned-lens codebase.
While step functions can generally be also used as attribution targets, the method above does not support this use case in its current form.